The data to date indicates the Waymo Driver is already reducing traffic injuries and fatalities in the places where we currently operate. At Waymo, we aim to reduce traffic injuries and fatalities by driving safely and responsibly, and will carefully manage risk as we scale our operations.
At Waymo, we believe the status quo of road safety is unacceptable. Autonomous driving technology can save lives and improves mobility for all.
1.19M
deaths worldwide due to vehicle crashes each year
42,514
deaths in the U.S. in 2022 and 2.5 million injuries
$836B
in harm from loss of life and injury each year
50M
injuries worldwide due to vehicle crashes each year
The World’s Most Experienced Driver™
Tens of millions of miles.
We have over 40 million miles of real-world driving experience — that’s enough to drive to the Moon and back 80 times.
Over a decade of experience.
We were born as the Google Self-Driving Car Project in 2009, and served the first of many fully autonomous rides in 2015.
Tens of thousands of happy riders.
On a weekly basis, we serve tens of thousands of riders across Phoenix, San Francisco, Los Angeles, and soon Austin.
Safer than human-driven vehicles.
With 100% fewer bodily injury claims and 76% fewer property damage claims, Swiss Re (one of the world’s leading reinsurers) concluded that Waymo is significantly safer than human-driven vehicles.
Safety Publications
Year
Topics
Safety Methodologies
Waymo's Safety Case Approach
Building a Credible Case for Safety: Waymo's Approach for the Determination of Absence of Unreasonable Risk
Francesca Favaro, Laura Fraade-Blanar, Scott Schnelle, Trent Victor, Mauricio Peña, Johan Engstrom, John Scanlon, Kris Kusano, Dan Smith
Waymo’s approach to building a reliable case for safety that can serve as a toolkit that any AV developer can use to inform their own safety case.
Framework for a conflict typology including causal factors for use in ADS safety evaluation
Kristofer D. Kusano, John M. Scanlon, Mattias Brännström, Johan Engström, Trent Victor
Grouping collisions with similar characteristics and causes is how traffic safety researchers measure effectiveness of different technologies, like autonomous vehicles. This paper introduces a comprehensive conflict typology that can be applied to both human and AV crash and near-crash data.
Determining Maximum Injury Potential
Methodology for Determining Maximum Injury Potential for Automated Driving System Evaluation
Kristofer Kusano, Trent Victor
The potential severity in a collision is affected by braking and steering. The metric developed in this paper predicts the worst case probability of injury as if there was no avoidance maneuvers. This metric is important when comparing different crash datasets.
Waymo's Fatigue Risk Management Framework: Prevention, Monitoring, and Mitigation of Fatigue-Induced Risks while Testing Automated Driving Systems
Francesca Favaro, Keith Hutchings, Philip Nemec, Lety Cavalcante, Trent Victor
Our proposed Fatigue Risk Management Framework addresses prevention, monitoring, and mitigation of fatigue-induced risks that affect autonomous specialists during testing of the Waymo Driver.
Waymo's Safety Methodologies and Safety Readiness Determinations
Nick Webb, Daniel Smith, Chris Ludwick, Trent Victor, Qi Hommes, Francesca Favaro, George Ivanov, Tom Daniel
Our Safety Framework – the careful and multilayered approach to safety that has made it possible for Waymo to deploy fully autonomous driving technology on public roads.
Collision Avoidance Effectiveness of an Automated Driving System Using a Human Driver Behavior Reference Model in Reconstructed Fatal Collisions
John M. Scanlon, Kristofer D. Kusano, Johan Engström, Trent Victor
A study examining how well the Waymo Driver avoids collisions by using a human behavior reference model — the response time and evasive action of a human driver that is non-impaired, with eyes always on the conflict (NIEON).
An omni-directional model of injury risk in planar crashes with application for autonomous vehicles.
Timothy L. McMurry, Joseph M. Cormier, Tom Daniel, John M. Scanlon, Jeff R. Crandall
Predicting injury risk in a vehicle collision is important for autonomous vehicle design, when most collisions happen in virtual simulations. This paper provides an injury risk function that is continuous in every direction that is more suitable for simulation use than previous injury risk curves.
Autonomous driving technology holds the promise to improve road safety and offer new mobility options to millions of people. The Waymo Safety Report, which was originally published in 2017, provides a high-level, general overview of our system safety program, how our fleet of fully autonomous vehicles work, our approach to testing and validation, and how we interact with the public.
Safety Performance Data
Safety Data from 7M Rider-Only Miles
Comparison of Waymo Rider-Only Crash Data to Human Benchmarks at 7.1 Million Miles
Kristofer D. Kusano, John M. Scanlon, Yin-Hsiu Chen, Timothy L. McMurry, Ruoshu Chen, Tilia Gode and Trent Victor
This study compares all Waymo crashes reported under NHTSA’s Standing General Order (SGO) over 7+ million rider-only miles driven through the end of October 2023 in Phoenix, San Francisco, and Los Angeles to comparable human benchmarks.
Safety Data from 1M Rider-Only Miles
Safety Performance of the Waymo Rider-Only Automated Driving System at One Million Miles
Trent Victor, Kristofer Kusano, Tilia Gode, Ruoshu Chen, Matthew Schwall
An assessment of all contact events experienced by the Waymo Driver during its first 1M miles without a human behind the wheel supporting that the Waymo Driver is successful at reducing injuries and fatalities.
Waymo Simulated Driving Behavior in Reconstructed Fatal Crashes within an AV Operating Domain
John M. Scanlon, Kristofer D. Kusano, Tom Daniel, Christopher Alderson, Alexander Ogle, Trent Victor
A study that explores the safety of the Waymo Driver using simulated versions of real-world events. Our latest paper looks at data on fatal human-driven crashes that occurred within our operating domain in Chandler, Arizona between 2008 - 2017.
Matthew Schwall, Tom Daniel, Trent Victor, Francesca Favaro, Henning Hohnhold
Our Public Road Safety Performance Data whitepaper includes details about the miles we’ve driven on public roads in Arizona to provide data about our safe operations in practice.
Comparative Safety Performance of Autonomous and Human Drivers
Luigi Di Lillo, Tilia Gode, Xilin Zhou, Margherita Atzei, Ruoshu Chen, Trent Victor
A real-world case study of the Waymo One service that compares human drivers against the Waymo Driver, using Swiss Re’s property damage liability and bodily injury claims data from 2016-2021 and Waymo’s rider-only data collected through August 1, 2023. The analysis shows that the Waymo Driver is significantly and consistently safer than human drivers when it comes to crash causation.
Benchmarks for Retrospective Automated Driving System Crash Rate Analysis Using Police-Reported Crash Data
John M. Scanlon, Kristofer D. Kusano, Laura A. Fraade-Blanar, Timothy L. McMurry, Yin-Hsiu Chen, and Trent Victor
This paper aims to ensure a fair comparison between autonomous and human driving by addressing the most common errors and biases and establishing valid benchmarks from the cities in which Waymo operates.
ADS Standardization Landscape
ADS Standardization Landscape: Making Sense of its Status and of the Associated Research Questions
Scott Schnelle, Francesca Favaro
This paper presents a simplified framework for abstracting and organizing the current landscape of ADS safety standards into high-level, long-term themes. This framework is then utilized to develop and organize associated research questions that have not yet reached widely adopted industry positions, along with identifying potential gaps where further research and standardization is needed.
Interpreting Safety Outcomes: Waymo’s Performance Evaluation in the Context of a Broader Determination of Safety Readiness
Francesca M. Favaro, Trent Victor, Henning Hohnhold, Scott Schnelle
This paper calls for a diversified approach to safety determination beyond the analysis of safety outcomes. It highlights a “credibility paradox” within the comparison between ADS data and human-derived baselines, and speaks to continuous confidence growth in ADS performance estimates
Measuring Surprise in the Wild
Measuring Surprise in the Wild
Azadeh Dinparastdjadid, Isaac Supeene, Johan Engstrom
This paper presents, for the first time, how computational models of surprise rooted in cognitive science and neuroscience combined with state-of-the-art machine learned generative models can be used to detect surprising human behavior in complex, dynamic environments like road traffic. We also present novel approaches to quantify surprise and use naturalistic driving scenarios to demonstrate a number of advantages over existing surprise measures from the literature.
An active inference model of car following: Advantages and applications
Ran Wei, Anthony D. McDonald, Alfredo Garcia, Gustav Markkula, Johan Engstrom, Matthew O'Kelly
The papers explore a novel way to model human road user behavior by means of active inference, an approach adopted from contemporary cognitive neuroscience. Specifically, the papers show how active inference can provide a middle ground between glass-box mechanistic models and black-box machine-learned models, generating versatile, yet interpretable behavioral outputs.
Challenges for the evaluation of automated driving systems using current ADAS and active safety test track protocols
Scott Schnelle, Kristofer D. Kusano, Francesca Favaro, Guy Sier, Trent Victor
To gain practical insight into the types of challenges and limitations arising from executing traditional consumer-focused testing protocols to an ADSs, the Waymo Driver was the subject of a testing campaign that leveraged several of the most difficult currently available ADAS and active safety test procedures. The Waymo Driver was able to pass all of the test procedures and the main challenges discovered were that most procedures that are designed to evaluate collision avoidance behavior could not be evaluated as designed due to the increased capabilities of the Waymo Driver that prevented the vehicle from even entering into a conflict.
Representative Pedestrian Collision Injury Risk
Representative pedestrian collision injury risk distributions for a dense-urban US ODD using naturalistic dash camera data
Eamon T. Campolettano, John M. Scanlon, Trent Victor
Assessing injury severity for collisions involving vulnerable road users (VRUs) is highly impactful for the continued development of traffic safety, including ADAS, ADS, and roadway design. Using naturalistic VRU collision data collected from dashboard cameras of third-party vehicles, a methodology for assessing event severity by pairing accelerometer and GPS data with video to compute impact speed was presented.
World Model Learning Through Active Inference
World model learning from demonstrations with active inference: application to driving behavior
Ran Wei, Alfredo Garcia, Anthony McDonald, Gustav Markkula, Johan Engstrom, Isaac Supeene, Matthew O’Kelly
The papers explore a novel way to model human road user behavior by means of active inference, an approach adopted from contemporary cognitive neuroscience. Specifically, the papers show how active inference can provide a middle ground between glass-box mechanistic models and black-box machine-learned models, generating versatile, yet interpretable behavioral outputs.
Modeling Adaptive Driving Behavior
Resolving uncertainty on the fly: Modeling adaptive driving behavior as active inference
Johan Engström, Ran Wei, Anthony McDonald, Alfredo Garcia, Matt O'Kelly, Leif Johnson
Understanding how drivers manage uncertainty is key for developing simulated human driver models for autonomous vehicles. A generalizable, interpretable, computational model for adaptive human driving behavior is needed to accomplish this, but existing models lack computational rigor or only address specific scenarios. This paper proposes such a model based on active inference, a behavioral modeling framework originating in computational neuroscience.
Kinematic characterization of micro-mobility vehicles during evasive maneuvers
Paolo Terranova, Shu-Yuan Liu, Sparsh Jain, Johan Engstrom, Miguel Perez
There is an increasing need to comprehensively characterize the kinematic performances of different Micromobility Vehicles (MMVs). Using a variety of test track experiments, this study (1) characterizes the kinematic behaviors of different MMVs during emergency maneuvers; (2) explores the influences of different MMV power sources on the device performances; and (3) investigates if piecewise linear models are suitable for modeling MMV trajectories.
Waymo significantly outperforms comparable human benchmarks over 7+ million miles of rider-only driving
Over 7 Million Rider Only Miles, compared to human benchmarks, the Waymo Driver had 85% reduction in injury causing crash rates and 57% reduction in police-reported crash rates.
Past the limit: Studying how often drivers speed in San Francisco and Phoenix
Waymo ran a study in May 2023 analyzing speed patterns in SF and Phoenix. The 10-day study revealed that from the data collected, drivers in Phoenix and San Francisco exceeded the speed limit from a quarter (27%) to almost half (47%) of the time observed, depending on the road speed limit.
Chief Safety Officer Mauricio Peña shares more about Waymo’s history for transparently publishing safety performance data and how the Waymo Driver is already reducing traffic injuries and fatalities in the cities where we operate.
Waymo’s Safety Best Practices Lead Francesca Favaro joined Brandon Bartneck's Future of Mobility podcast to share how we approach the safe deployment of our autonomous driving technology.
Our latest paper describing Waymo’s approach to building a reliable case for safety — a novel and thorough blueprint for use by any company building fully autonomous driving systems.






 Waymo's Safety Case Approach
Waymo's Safety Case Approach Framework for a Conflict Typology
Framework for a Conflict Typology Determining Maximum Injury Potential
Determining Maximum Injury Potential Fatigue Risk Management
Fatigue Risk Management Response Time Modeling
Response Time Modeling Safety Methodologies
Safety Methodologies Collision Avoidance Effectiveness
Collision Avoidance Effectiveness An Omni-Directional Model of Injury Risk
An Omni-Directional Model of Injury Risk
 Safety Data from 7M Rider-Only Miles
Safety Data from 7M Rider-Only Miles Collision Avoidance Testing
Collision Avoidance Testing Simulated Reconstruction
Simulated Reconstruction Safety Performance Data
Safety Performance Data Benchmarking Against Police-Reported Crash Data
Benchmarking Against Police-Reported Crash Data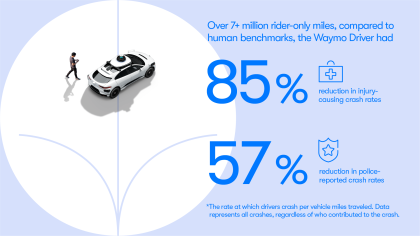 December 20, 2023
December 20, 2023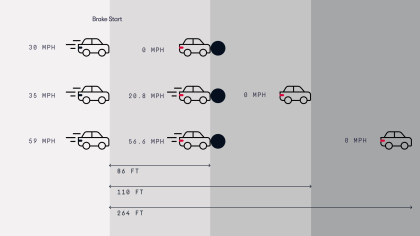 July 11, 2023
July 11, 2023 July 6, 2023
July 6, 2023 June 4, 2023
June 4, 2023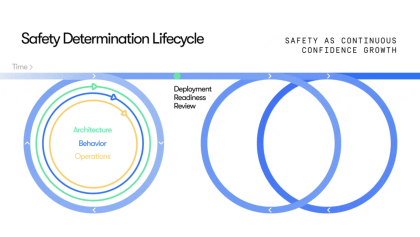 March 22, 2023
March 22, 2023